
















































































Пензенские учёные создают безэкипажный подводный аппарат, который найдёт широкое применение в исследованиях океана, поисково-спасательных работах под водой, а также в военном деле. Как говорят авторы, их аппарат превосходит аналоги по многим показателям — он более манёвренный, бесшумный и скрытный.
О разработке сообщает Минобрнауки России.
Похожи на подводных обитателей
Интерес к подводной робототехнике растёт во всём мире. Это связано с широким кругом её применения: роботы помогают изучать морскую флору и фауну, подводные геологические структуры, обследуют и ремонтируют нефтяные и газовые скважины на дне, используются в военном деле.
Существуют неавтономные подводные аппараты и автономные. Принципы их работы различны. Первые прикреплены к какому-либо судну. Через проводной канал они получают необходимую энергию для своей работы.
У автономных аппаратов есть встроенный аккумулятор. Такими устройствами можно управлять дистанционно.
А наиболее оптимальным, безопасным и экономичным средством для исследования рельефа дна являются подводные аппараты бионического типа. Это значит, что они повторяют форму рыб и имеют гибкую конструкцию.
«Они производят значительно меньше шума в процессе движения, обладают большей манёвренностью, меньше воздействуют на окружающую обстановку. К примеру, они не поднимают ил со дна, тихо работают, оставляют менее заметный след на воде. И внешне похожи на подводных обитателей. Поэтому их не принимают за чужака жители морского дна», — объясняет автор разработки, аспирант Пензенского государственного университета Илья Урваев.
Неудивительно, что инженеры всё чаще отдают предпочтение аппаратам бионического типа, а не классическим вариантам: торпедообразным, цилиндрическим и сигарообразным устройствам.

Два в одном: тунец и дельфин
Конструкция аппарата, разработанного в Пензенском госуниверситете, основана на механике движения рыб. В воде он перемещается благодаря «рыбьему» хвосту.
Принципиальное отличие разработки пензенских учёных в том, что в механизм работы хвостовой части заложены две техники плавания морских обитателей — тунца и дельфина.
Тунцы способны преодолевать большие расстояния. Их хвост, большой и мощный, расположен вертикально, позволяя рыбе плавать на высоких скоростях и быстро маневрировать. У хвостового плавника несколько частей, помогающих рыбе сохранять устойчивость и контроль. А хвост дельфина имеет мощную мускулатуру. Он расположен горизонтально, а не вертикально, как у рыб. Благодаря этому дельфины умеют плавно передвигаться, с лёгкостью обходя препятствия.
Благодаря соединению двух техник плавания морских обитателей «железный хвост» бионического беспилотника от научного коллектива ПГУ меняет направление движения. Поэтому аппарат сможет подстраиваться под определённые задачи, переключая виды плавания.
«Подвижная платформа ориентирует хвостовой плавник в соответствии с желаемым движением. Для каких-то целей будет использоваться режим плавания, как у тунца — например, если нужно быстрее проплыть участок. А для задачи маневрирования под водой будет использоваться положение хвостовой части, как у дельфина, — горизонтально», — рассказывает Урваев.
Рыба-робот с «мозгами»
В носовой части рыбы-робота расположены видеокамера и гидролокатор. В среднюю часть встроены основные электронные компоненты и брюшные плавники. Последние позволяют накреняться и менять глубину погружения.
В этой же части находится система управления — «мозги» аппарата. Она состоит из блока управления и сбора данных, блока навигации и блока контроля хвостового движителя (плавника). Здесь же и флеш-память, которой предстоит накапливать собранную информацию, а затем передавать её оператору.
Ученые исследовали гидродинамическую модель аппарата. Так им удалось выяснить, как «железная рыба» будет вести себя в имитационных условиях под водой.
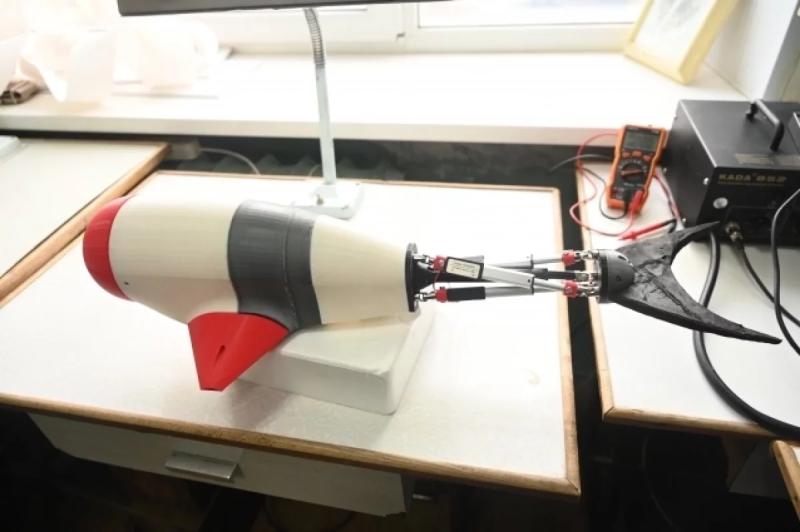
Пока создан макетный образец устройства. Реальный образец, как говорит Урваев, будет иметь длину 1,5 м и диаметр 30 см. Масса — около 20 кг.
Каркас рыбы-робота собираются сделать из алюминиевого сплава, а внешнюю оболочку — из пластика. Это также даст аппарату преимущество перед аналогами, которые, как правило, более громоздкие и тяжёлые.
Управлять «железной рыбой» будет оператор с помощью дистанционного пульта.
«Подводный аппарат может найти применение в военной сфере, при проведении разведывательных операций и везде, где нужно погружаться в воду. Это гидрометеорологические и океанологические исследования, поисково-спасательные работы под водой», — добавляет Урваев.
Сейчас научная группа ищет способ увеличить дальность работы подводного беспилотника. Она будет достигать нескольких десятков километров.
























